


1
of
4
Loading...
Jumper | SKU:
CA0456
Jumper XiaKe 800 Portable Fixed Wing VTOL PNP Version
$199.00
Unit price
/
Unavailable
Jumper XiaKe 800 Portable Fixed Wing VTOL PNP Version is backordered and will ship as soon as it is back in stock.
Couldn't load pickup availability

Jumper XiaKe 800 Portable Fixed Wing VTOL PNP Version
$199.00
Unit price
/
Unavailable
Jumper XiaKe 800 Fixed Wing Y3 Vertical Takeoff Wingspan 800mm FPV Aircraft Long Flight Airplanes

Specifications:
Brand: Jumper
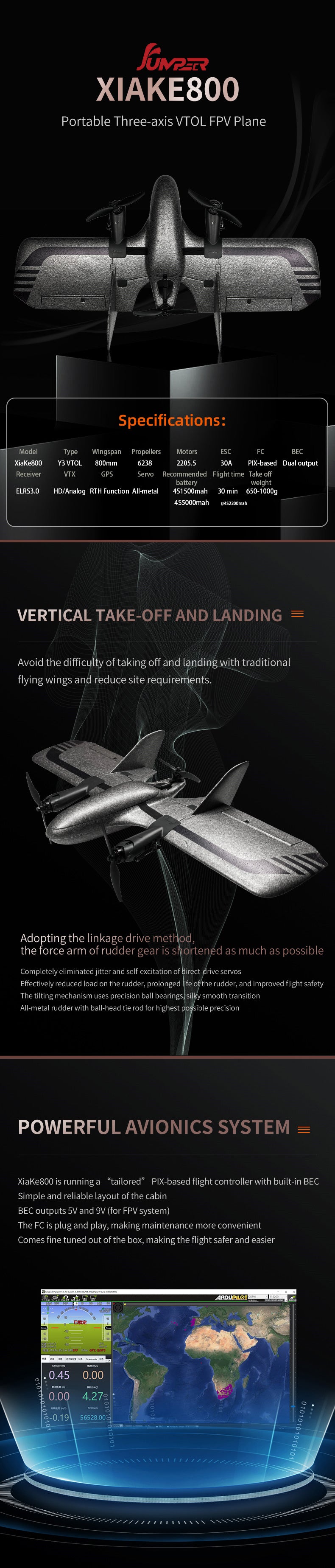
Model: XiaKe800
Model: Y3 vertical takeoff wing
Wing span: 800mm
Propeller: 6238
Motor: 2205.5
Electric regulation: 30A
Flight control: based on PIX
BEC: dual voltage output
Receiver: ELRS3.0
FPV interface: HD/analog
GPS: One click return
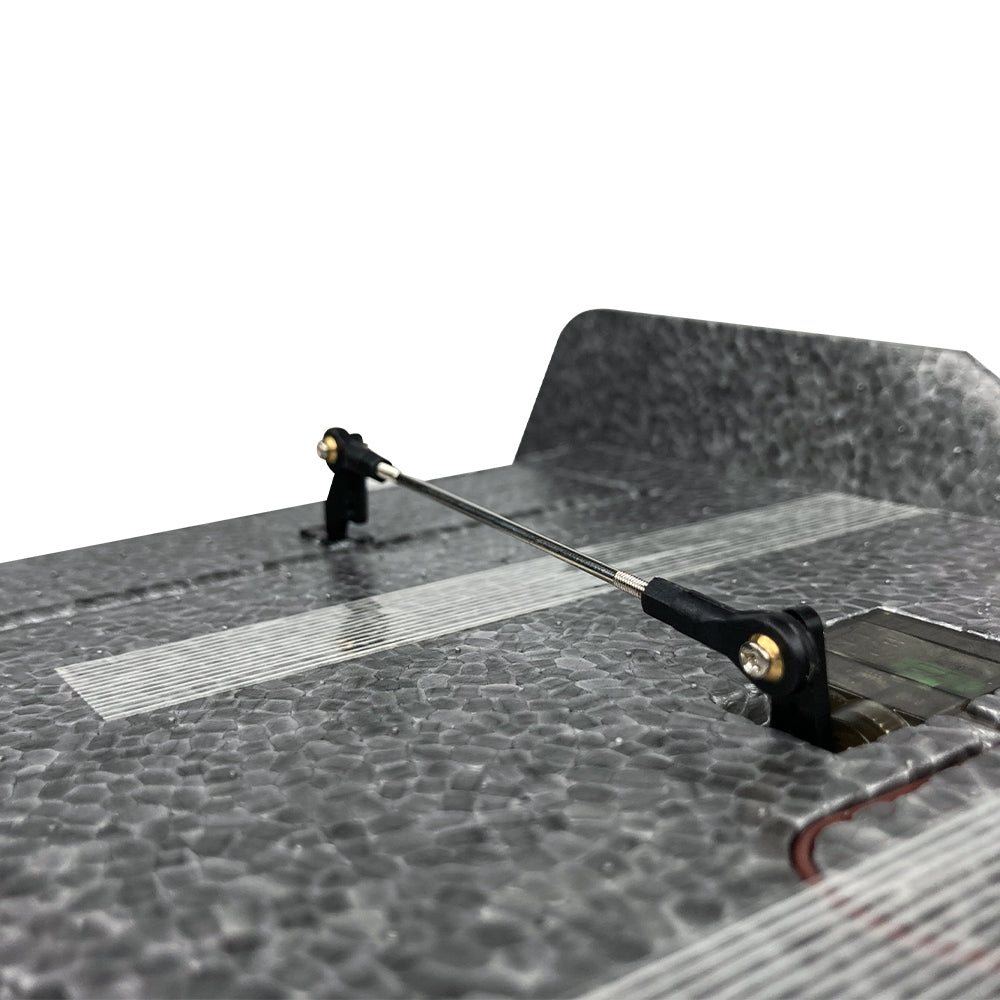
Steering gear: all metal teeth
Battery: recommended 4s 1500-2200mah 30C
Endurance: 30 minutes
Takeoff weight: 650-1000g
Flight Modes:
1. Vertical self stabilization mode: only attitude stabilization. Throttle, lifting, rolling and heading are all manually controlled
2. Self stabilized flight mode A: only attitude stabilization. Throttle, lifting and rolling are all manually controlled
3. Cruise mode: accelerator lever middle position, altitude and course keeping;
4. Return mode: fixed wing return, with an altitude of 100 meters, return to hover over the takeoff point without landing
Flight parameter prompt:
1. Minimum altitude warning: the default is 20m. If the aircraft is lower than 20m, the "altitude too low" will be broadcast
2. Battery power broadcast: it will broadcast the percentage of power of airborne power battery in real time
3. Mode switching broadcast: when switching modes, prompt the current flight mode
4. GPS locking announcement: when GPS is locked, "GPS 3D locking" will be announced"
PNP Package Included:
Xiake 800 fully assembled fuselage assembly x 1
(Radio, battery not included)
Precautions for flight process:
1. "Vertical self stabilizing mode" takeoff: Do not push the accelerator sharply, and adjust the aircraft in a horizontal attitude in real time.
2. Conversion from "vertical self stabilizing mode" to "self stabilizing mode flight mode A": for the first flight, it is recommended that the conversion height should not be less than 30 meters, the middle position of the throttle lever, the switch, and the flight control will automatically control the conversion, and it is prohibited to hit the stick during this process. During the conversion process of the aircraft, the motor speed increases significantly (listen to the sound). After the conversion, the remote controller resumes the control of the motor speed (at this time, the sound drops significantly corresponding to the middle position of the accelerator). The tail motor stops rotating, the nose cocks up, and the aircraft turns to the level flight state. The conversion is completed (this process takes 2-3 seconds).
3. Switch from "self stabilizing mode flight mode A" to "cruise mode": adjust the altitude, switch to "cruise mode" after heading, and the aircraft will enter the altitude and heading holding state (accelerator 50%)
4. "Return mode": The aircraft altitude is automatically adjusted to 100m and returns. If it is necessary to change out, just switch to other modes.
5. Turn to "vertical self stabilizing mode" for landing: fly to the altitude above the landing point (the altitude is not too high), center the throttle, switch the switch, and the aircraft will quickly turn to "vertical self stabilizing mode".
6. Attention shall be paid during landing: If the hovering altitude is too high, the motor power will drop during fuel collection and landing, which will weaken the self stability adjustment ability of the aircraft and significantly increase the impact of wind. Suggestion: After switching from level flight to vertical flight, still use the fixed wing to fly (the push rod lowers the altitude, and the throttle can be low at this time). With the decrease of altitude and speed, gradually push up the throttle (remember, it is impossible to stall in vertical flight).
Warning: Do not lock the throttle when the aircraft is in the air (a new return point will be saved every time the aircraft is unlocked)
Specifications:
Brand: Jumper
Model: XiaKe800
Model: Y3 vertical takeoff wing
Wing span: 800mm
Propeller: 6238
Motor: 2205.5
Electric regulation: 30A
Flight control: based on PIX
BEC: dual voltage output
Receiver: ELRS3.0
FPV interface: HD/analog
GPS: One click return
Steering gear: all metal teeth
Battery: recommended 4s 1500-2200mah 30C
Endurance: 30 minutes
Takeoff weight: 650-1000g
Flight Modes:
1. Vertical self stabilization mode: only attitude stabilization. Throttle, lifting, rolling and heading are all manually controlled
2. Self stabilized flight mode A: only attitude stabilization. Throttle, lifting and rolling are all manually controlled
3. Cruise mode: accelerator lever middle position, altitude and course keeping;
4. Return mode: fixed wing return, with an altitude of 100 meters, return to hover over the takeoff point without landing
Flight parameter prompt:
1. Minimum altitude warning: the default is 20m. If the aircraft is lower than 20m, the "altitude too low" will be broadcast
2. Battery power broadcast: it will broadcast the percentage of power of airborne power battery in real time
3. Mode switching broadcast: when switching modes, prompt the current flight mode
4. GPS locking announcement: when GPS is locked, "GPS 3D locking" will be announced"
PNP Package Included:
Xiake 800 fully assembled fuselage assembly x 1
(Radio, battery not included)
Precautions for flight process:
1. "Vertical self stabilizing mode" takeoff: Do not push the accelerator sharply, and adjust the aircraft in a horizontal attitude in real time.
2. Conversion from "vertical self stabilizing mode" to "self stabilizing mode flight mode A": for the first flight, it is recommended that the conversion height should not be less than 30 meters, the middle position of the throttle lever, the switch, and the flight control will automatically control the conversion, and it is prohibited to hit the stick during this process. During the conversion process of the aircraft, the motor speed increases significantly (listen to the sound). After the conversion, the remote controller resumes the control of the motor speed (at this time, the sound drops significantly corresponding to the middle position of the accelerator). The tail motor stops rotating, the nose cocks up, and the aircraft turns to the level flight state. The conversion is completed (this process takes 2-3 seconds).
3. Switch from "self stabilizing mode flight mode A" to "cruise mode": adjust the altitude, switch to "cruise mode" after heading, and the aircraft will enter the altitude and heading holding state (accelerator 50%)
4. "Return mode": The aircraft altitude is automatically adjusted to 100m and returns. If it is necessary to change out, just switch to other modes.
5. Turn to "vertical self stabilizing mode" for landing: fly to the altitude above the landing point (the altitude is not too high), center the throttle, switch the switch, and the aircraft will quickly turn to "vertical self stabilizing mode".
6. Attention shall be paid during landing: If the hovering altitude is too high, the motor power will drop during fuel collection and landing, which will weaken the self stability adjustment ability of the aircraft and significantly increase the impact of wind. Suggestion: After switching from level flight to vertical flight, still use the fixed wing to fly (the push rod lowers the altitude, and the throttle can be low at this time). With the decrease of altitude and speed, gradually push up the throttle (remember, it is impossible to stall in vertical flight).
Warning: Do not lock the throttle when the aircraft is in the air (a new return point will be saved every time the aircraft is unlocked)
